A lo largo del desarrollo de la robótica, se ha tenido la necesidad de que los diferentes tipos de robots entiendan e interactúen con el ambiente que los rodea. Esto permite que puedan tomar decisiones, ya sea en forma preventiva o reactiva, para evitar posibles peligros, tanto hacia el robot como hacia el medio con el que interactúan.
Los ingenieros han utilizado diferentes tipos de sensores para darle la habilidad a los robots de entender e interactuar con el medio, los cuales van desde simples actuadores on/off, sensores de movimiento, sensores de tacto, micrófonos, bocinas, diferentes tipos de cámaras y en especial el uso de un tipo de sensores ópticos llamados LiDAR, por sus siglas en inglés (Light Detection and Ranging). Estos sensores LiDAR en la actualidad son ampliamente usados en la robótica móvil, ya sea en vehículos terrestres autónomos o vehículos aéreos autónomos.
El uso de los sensores LiDAR en los vehículos terrestres autónomos se elige por su rapidez para obtener un “mapa” del entorno, la exactitud del mismo, así como la cantidad de información que se obtiene de forma casi instantánea. Los principales desafíos que aún presenta esta tecnología son los costos de los sensores y la necesidad de tener dispositivos que procesen la gran cantidad de información que generan.
El sensor LiDAR se usa ampliamente en muchos sectores, por ejemplo: en la agricultura para obtener información de la vegetación, en la arqueología para obtener mapas de edificios o monumentos; en los vehículos terrestres autónomos se usa para la detección de obstáculos, entre muchas otras aplicaciones.
La detección de obstáculos es de suma importancia para evitar cualquier tipo de peligro que surja. Algunos de los riesgos para los vehículos autónomos son la colisión con otro vehículo, atropellar a un peatón, no reconocer las señales de tráfico, salirse de las rutas o carriles previstos y no frenar al detectar un obstáculo. A estos se les conoce como obstáculos positivos, ya que son los que están por encima del camino.
Los obstáculos negativos para vehículos terrestres autónomos son baches, zanjas, acantilados, topes, fosas o cualquier tipo de obstáculos no visibles que pueden dañar a los vehículos o a los pasajeros. Los daños de los vehículos terrestres autónomos van desde afectaciones a las llantas, a la suspensión, vuelcos o incluso la pérdida total del vehículo.
Para entender el ambiente que rodea a los vehículos autónomos, se han usado métodos como el reconocimiento de imágenes mediante diferentes tipos de cámaras, los sensores ultrasónicos y sensores de detección y rango de luz (LiDAR), o la combinación de algunos o varios sensores; todo ello empleando técnicas de inteligencia artificial para detectar, segmentar y clasificar la información que se obtiene de los sensores.
En los últimos años, se ha trabajado arduamente en reconocer y clasificar los diferentes tipos de peligros u obstáculos usando sensores LiDAR, además de aplicar métodos para evitarlos. Los autores de estos trabajos escriben sobre formas de entender mejor el medio ambiente para que los vehículos terrestres autónomos se mantengan fuera de peligro. La gran mayoría de estos trabajos de investigación se ha realizado en detección positiva de obstáculos. Sin embargo, la detección de obstáculos negativos y cómo evitarlos es un trabajo que es menos explorado.
LiDAR es un sensor que envía un haz de luz láser, generalmente de 1064 nm (nanómetros) que es nIR (rango de infrarrojo cercano), el cual mide el tiempo entre el envío y el reflejo del haz de luz láser, generando un mapa tridimensional preciso, de alta calidad, aunque depende del tipo de LiDAR que se esté usando.
Un sistema LiDAR típico consta de un escáner que emite un láser, un detector y, a veces, un receptor GPS (sistema de posicionamiento global). Un sensor LiDAR puede generar un conjunto de datos que contiene millones de puntos, llamados nube de puntos. En la Figura 1 podemos ver la nube de puntos segmentada de un sensor LiDAR de la marca Velodyne. La imagen fue tomada del artículo A fast approach for vehicle-like region proporsal based on 3D lidar data, Wang 2015.
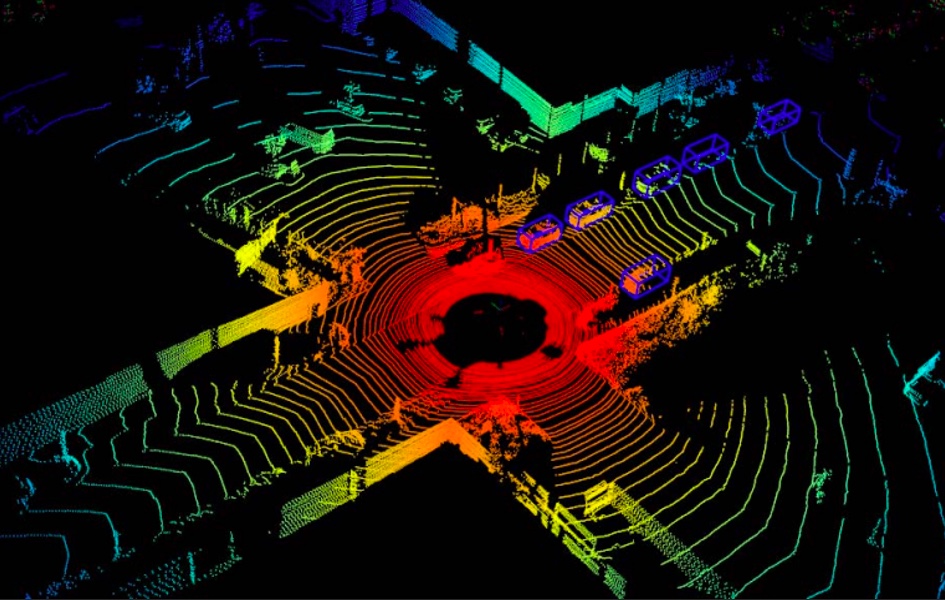
La nube de puntos debe de ser procesada para entender bien la información que representa. Este procedimiento puede ser una segmentación, un modelado o una clasificación, usando diferentes técnicas de inteligencia artificial.
El procesamiento y análisis de las nubes de puntos en función de la aplicación
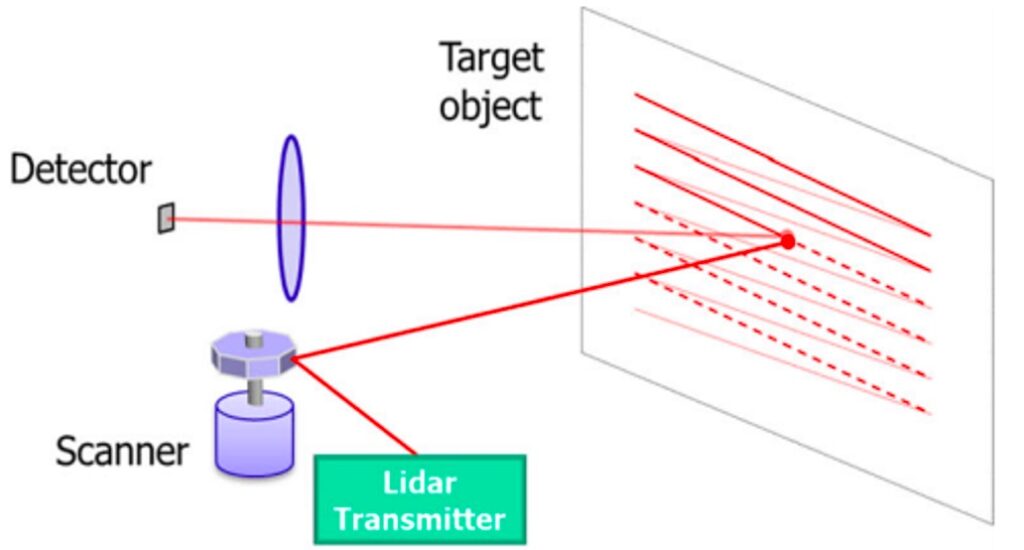
Este proceso requiere de métodos computacionales para la detección, reconocimiento y clasificación de regiones de interés de forma automática, eficiente y rápida. En Figura 2 se muestra un diagrama mínimo de lo que conforma un sensor LiDAR.
El sensor LiDAR sigue aumentando su abanico de aplicaciones en diferentes áreas, por sus características y resolución. Sin embargo, existe el desafío de tener un buen desempeño en condiciones climáticas como lluvia, niebla, nieve o presencia de mucho polvo. Otro desafío pueden ser la inconsistencia de los datos o los datos incompletos, además del ruido de los datos. La gran limitante para el uso masivo de sensores LiDAR es el costo; aún es caro adquirir uno de alta gama. Aunque existen sistemas LiDAR de bajo costo, estos sistemas tienen un rendimiento limitado.
En general, en comparación con sensores como cámaras, radares, sensores ultrasónicos, LiDAR es el sensor más preciso en el rango de medición. No obstante, la fusión con cámaras y otros sensores ayuda a mejorar su desempeño en tareas de reconocimiento. Los datos LiDAR serán de gran ayuda para procesar y reconocer los obstáculos, usando sistemas embebidos de alto rendimiento computacional enfocados al procesamiento digital de imágenes y al aprendizaje automático. Con ello aumentará la diversidad de propuestas en el campo de la detección y reconocimiento de obstáculos.