Desde la perspectiva de la mecánica, el equilibrio es la condición en la que una partícula o cuerpo tiene aceleración cero. O sea, la sumatoria de todas las componentes de las fuerzas en los ejes X y Y, así como la sumatoria de los momentos, es igual a cero. Las ecuaciones de equilibrio encuentran aplicación en el diseño de los dispositivos ortoprotésicos, como es el caso del sistema de tres fuerzas que se debe aplicar en los segmentos del cuerpo para al menos reducir los grados de deformación de una articulación.
El peso es la fuerza con que la Tierra atrae a los cuerpos y, como es conocido, se calcula multiplicando la masa por la aceleración de la gravedad. A su vez, el cuerpo humano está compuesto por segmentos que cambian la posición relativa a otros segmentos del cuerpo. Cada segmento tiene un peso, que en conjunto suman el peso de la persona. El peso de los segmentos actúa en su centro de masa (CoM), y dependiendo de la posición relativa de los segmentos el CoM del cuerpo completo se ubicará en diferentes posiciones. Por ejemplo, en la posición anatómica (bipedestación con brazos a ambos lados del cuerpo), el CoM de una persona se encuentra a 55 % de la altura de la persona y delante de la vértebra S2. Cualquier modificación de la posición de los segmentos, o inclinación de la persona, alterará la posición del CoM.
La proyección de las fuerzas se conoce como línea de acción de las fuerzas y, de acuerdo con los principios de transmisibilidad de la mecánica, todas las fuerzas se pueden trasladar a lo largo de dicha línea de acción. En bipedestación, la proyección del peso se ubica entre las fuerzas de reacción con el suelo y dentro de la base de soporte (área formada por todos los puntos en los que se apoya la persona en el suelo). La suma de ambas fuerzas de reacción del suelo es igual al peso de las personas, cumpliendo así con el principio del equilibrio. La habilidad que tiene la persona para mantener la posición de equilibrio (control de la postura estática) se conoce como estabilidad.
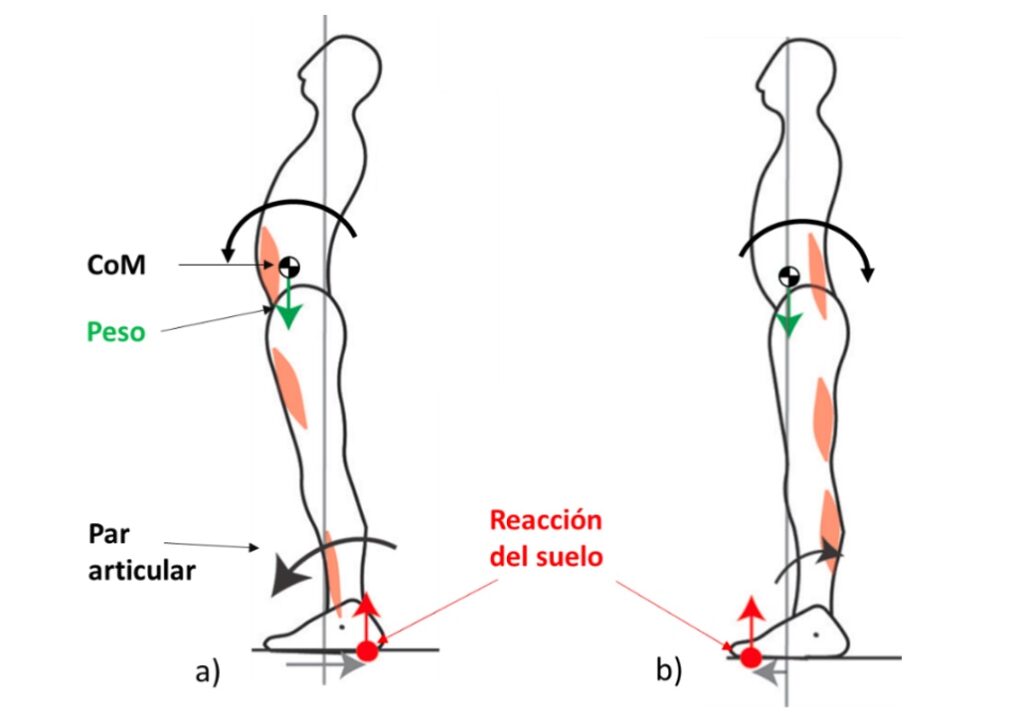
Sin embargo, las personas no mantienen una posición estática en bipedestación, sino que, debido a que el CoM se encuentra elevado sobre la base de soporte, ocurren movimientos de oscilación para que la proyección de la línea de gravedad se ubique dentro de la base de soporte. Los músculos antigravitatorios ajustan de manera flexible los cambios en la base de sustentación, la alineación de las líneas de carga y los cambios del entorno (Horak, 2009). En el plano sagital, la proyección de la reacción del suelo deberá pasar por la articulación para que el momento muscular sea nulo. Cuando la reacción del suelo está posterior al tobillo, los músculos flexores dorsales del pie, extensores de rodilla y flexores de tronco corregirán la postura. Por lo general, la línea de gravedad pasa anterior al tobillo, provocando la activación de los músculos flexores plantares, los flexores de rodilla y los erectores de columna para contrarrestar este efecto (Fig. 1b).
Las personas con alteraciones en el sistema musculoesquelético, con espasticidad o distonías, con bajo control motor selectivo, lesiones en tendones, amputaciones parciales de pie o en niveles superiores, entre otras, deben utilizar dispositivos como órtesis y/o prótesis, según sea el caso, que les permitan dar respuesta a las cargas, y poder compensar con otras estructuras musculares para mantener el equilibrio. En este sentido, se pueden emplear órtesis tobillo-pie con reacción al piso cuando tienen alterados los músculos flexores plantares que, como se describió anteriormente, al pasar la línea de reacción del suelo delante del tobillo tienen una participación importante en el control postural.
Las asimetrías en las estructuras corporales también afectan el equilibrio. Quizá la más evidente es la diferencia en la longitud de las extremidades inferiores. Sin embargo, la desalineación de las articulaciones como rodilla en hiperextensión, en genus valgo o varo, pie equino varo, pie plano, cavo, en pronación o supinación, entre otras, también contribuyen a estas asimetrías. Las asimetrías causan que el peso se distribuya de manera desigual entre las extremidades, provocando un incremento en el desplazamiento del CoM y del riesgo de pérdida de estabilidad (Lobo et al., 2021). En este sentido, se deberán emplear los dispositivos que permitan recuperar las alineaciones articulares o las discrepancias de la longitud de las extremidades.
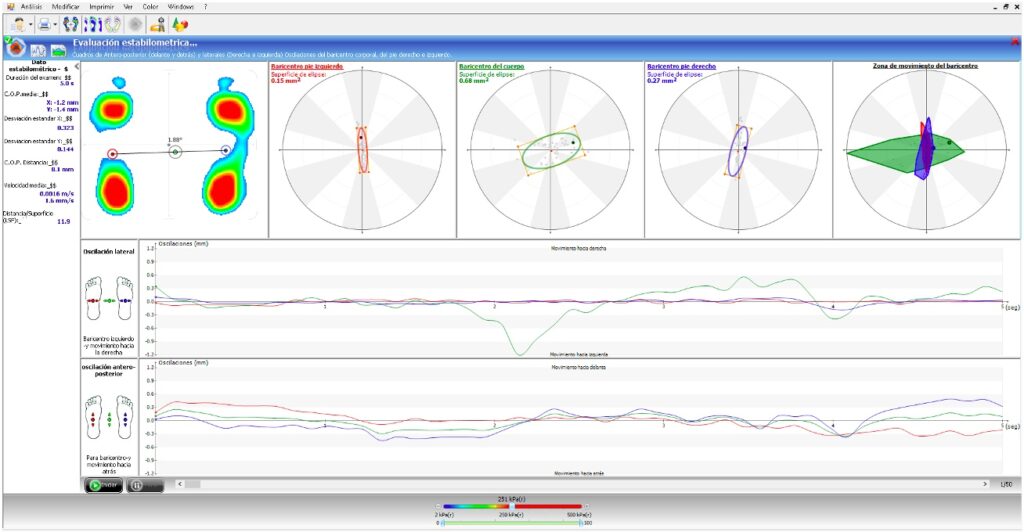
Existen varias pruebas para analizar la estabilidad de las personas, una de ellas es la que se realiza en las plataformas de presión. El centro de presión (CoP) se calcula como el centroide del área que mide el número total de sensores activos durante la prueba, lo que representa la distribución espacial de la presión a lo largo del tiempo (Buldt et al., 2018). La proyección del CoM sobre la plataforma baropodométrica describirá una trayectoria que se circunscribe en una elipse cuya área se define como área de balanceo del centro de presión (CoPsa) y cuantifica el balanceo del cuerpo (Fig. 2).
Referencias
Buldt, A. K., Forghany, S., Landorf, K. B., Murley, G. S., Levinger, P., & Menz, H. B. (2018). Centre of pressure characteristics in normal, planus and cavus feet. Journal of Foot and Ankle Research, 11(1), 3. https://doi.org/10.1186/s13047-018-0245-6
Horak, F. B. (2009). Postural Control. In M. D. Binder, N. Hirokawa, & U. Windhorst (Eds.), Encyclopedia of Neuroscience (pp. 3212-3219). Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-540-29678-2_4708
Le Mouel, C., & Brette, R. (2017). Mobility as the Purpose of Postural Control [Hypothesis and Theory]. Frontiers in Computational Neuroscience, 11. https://doi.org/10.3389/fncom.2017.00067
Lobo, A. A., Joshua, A. M., Nayak, A., Mithra P, P., Misri, Z., & Pai, S. (2021). Effect of Compelled Body Weight Shift (CBWS) Therapy in Comparison to ProprioceptiveTraining on Functional Balance, Gait, andMuscle Strength Among Acute Stroke Subjects. Annals of Neurosciences, 28(3-4), 162-169. https://doi.org/10.1177/09727531211063132
Los autores son el doctor Raide Alfonso González Carbonell, profesor en la licenciatura en órtesis y prótesis; la maestra Luisa Alejandra Santos Borráez, profesora en la licenciatura en órtesis y prótesis; y el doctor Igor Salinas Sánchez, profesor en la licenciatura en órtesis y prótesis, además de coordinador de las licenciaturas de la ENES Juriquilla de la Universidad Nacional Autónoma de México
AQUÍ PUEDES LEER TODAS LAS ENTREGAS DE “DESDE LA UNAM”, LA COLUMNA DE LA UNAM CAMPUS JURIQUILLA PARA LALUPA.MX
https://lalupa.mx/category/aula-magna/desde-la-unam/